NACHI

Click to zoom • Drag to pan
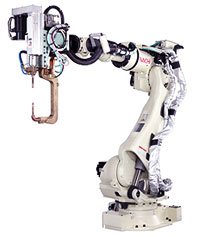
SRA100HS/SRA100HB
Product Description
**Cable built into the hollow arm** Welding cables and hoses packed tightly inside arms with hollow construction. * Avoids interference with peripheral equipment through the displacement of cables. * Improved reliability and safety of cable performance through wrist operations * The embedded welding cables in the arm make the off-line programming easier. **Compact body** * Minimized robot height so it can be used in multilevel arrangements
Technical Specifications
| Spesifikasi | SRA100HS-01 | SRA100HB-01 |
|---|---|---|
| Structure | Articulated | Articulated |
| Number of axes | 6 | 6 |
| Drive system | AC servo system | AC servo system |
| Max. operating envelope | ||
| J1 | ±3.14rad (±180°) | ±3.14rad (±180°) |
| J2 | -2.09 ~ +1.05rad (-120° ~ +60°) | -2.09 ~ +1.05rad (-120° ~ +60°) |
| J3 | -2.18 ~ +1.57rad (-125° ~ +60°) | -2.64 ~ +1.57rad (-151° ~ +90°) |
| J4 | ±3.66rad (±210°) | ±3.66rad (±210°) |
| J5 | ±2.18rad (±125°) | ±2.18rad (±125°) |
| J6 | ±3.66rad (±210°) | ±3.66rad (±210°) |
| Max. velocity | ||
| J1 | 2.37rad/s (136°/s) | 2.37rad/s (136°/s) |
| J2 | 2.00rad/s (115°/s) | 2.00rad/s (115°/s) |
| J3 | 2.79rad/s (160°/s) | 2.79rad/s (160°/s) |
| J4 | 3.66rad/s (210°/s) | 3.93rad/s (225°/s) |
| J5 | 3.05rad/s (175°/s) | 3.05rad/s (175°/s) |
| J6 | 5.41rad/s (310°/s) | 5.50rad/s (315°/s) |
| Payload | ||
| Wrist | 100kg | 100kg |
| Forearm | 20kg | 20kg |
| Allowable static load torque for wrist | ||
| J4 | 830N·m | 650N·m |
| J5 | 830N·m | 650N·m |
| J6 | 441N·m | 315N·m |
| Allowable moment of inertia for wrist | ||
| J4 | 85kg·m² | 85kg·m² |
| J5 | 85kg·m² | 85kg·m² |
| J6 | 45kg·m² | 45kg·m² |
| Position repeatability | ±0.06mm | ±0.06mm |
| Installation | Floor | Floor |
| Ambient conditions | Ambient temperature: 045°CAmbient humidity: 2085%RH (no condensation)Vibration: ≤0.5G (4.9m/s²) | Sama |
| Noise level | 79.6dB | 79.6dB |
| Robot mass | 690kg | 750kg |
Need More Information?
Contact our technical specialists for detailed product information, pricing, and availability.